Generally, three characteristic curves are considered important for DC motors which
are, (i) Torque vs. armature current, (ii) Speed vs. armature current and (iii) Speed vs. torque.
These are explained below for D.C. Series Motor.
These characteristics are determined by keeping the following two relations in mind.
Ta ∝ ɸ.Ia and N ∝ Eb/ɸ
These above equations can be studied at – emf and torque equation of dc machine.
For a DC motor, magnitude of the back emf is given by the same emf equation of a dc
generator i.e. Eb = PɸNZ / 60A. For a machine, P, Z and A are constant, therefore, N ∝ Eb/ɸ
Circuit Diagram:

Characteristics Of DC Series Motors:
Torque Vs. Armature Current (Ta-Ia)
This characteristic is also known as electrical characteristic. We know that torque is
directly proportional to the product of armature current and field flux, Ta ∝ ɸ.Ia. In DC series
motors, field winding is connected in series with the armature, i.e. Ia = If
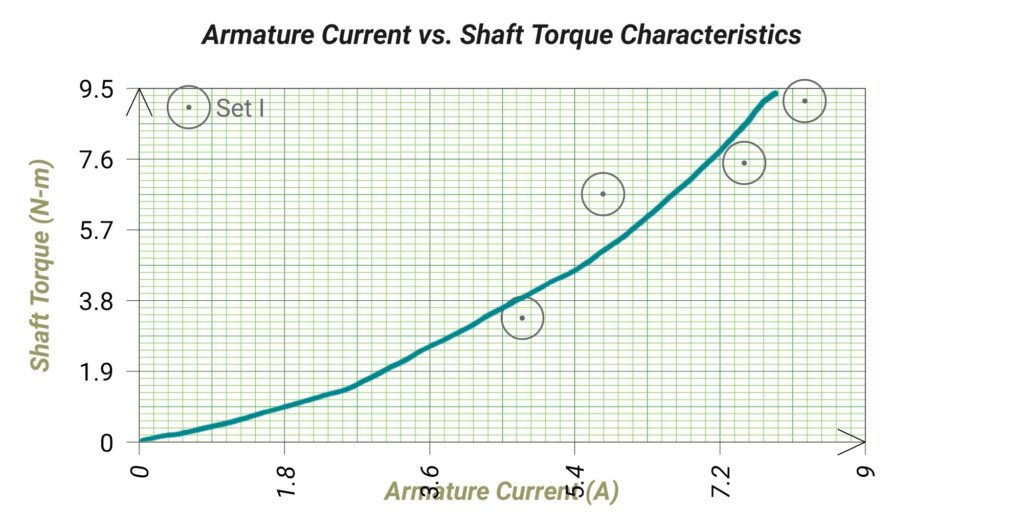
. Therefore, before
magnetic saturation of the field, flux ɸ is directly proportional to Ia. Hence, before magnetic
saturation Ta α Ia2
Therefore, the Ta-Ia curve is parabola for smaller values of Ia.
After magnetic saturation of the field poles, flux ɸ is independent of armature current Ia.
Therefore, the torque varies proportionally to Ia only, T ∝ Ia. Therefore, after magnetic
saturation, Ta-Ia curve becomes a straight line.
The shaft torque (Tsh) is less than armature torque (Ta) due to stray losses. Hence, the curve
Tsh vs Ia lies slightly lower.
In DC series motors, (prior to magnetic saturation) torque increases as the square of armature
current, these motors are used where high starting torque is required.
Speed Vs. Armature Current (N-Ia)
We know the relation, N ∝ Eb/ɸ
For small load current (and hence for small armature current) change in back emf Eb is small
and it may be neglected. Hence, for small currents speed is inversely proportional to ɸ. As we
know, flux is directly proportional to Ia, speed is inversely proportional to Ia. Therefore, when
armature current is very small the speed becomes dangerously high. That is why a series
motor should never be started without some mechanical load.
But, at heavy loads, armature current Ia is large. And hence, speed is low which results in
decreased back emf Eb. Due to decreased Eb, more armature current is allowed.
Speed Vs. Torque (N-Ta)
This characteristic is also called as mechanical characteristic. From the above
two characteristics of DC series motor, it can be found that when speed is high, torque is
low and vice versa.


Views: 221
Khub bhalo hoecche.eibhabi egea jao..chesta korò hal chhero na .eibhabei safollya ekdin asbei.
God bless you m
Ebhabei pase theko. Asirbaad koro jeno aro boro hote pari.
I could not resist commenting. Very well written!
Hola! I’ve been following your web site for a long time
now and finally got the courage to go ahead and give you a shout out from Lubbock Texas!
Just wanted to mention keep up the excellent job!
This is my first time visit at here and i am really impressed to read everthing at one place.
Heya i am for the first time here. I came across this board and
I find It really useful & it helped me out a lot.
I hope to give something back and help others like you helped me.
Its like you read my mind! You appear to know a lot
about this, like you wrote the book in it or
something. I think that you can do with a few pics to drive the
message home a bit, but instead of that, this is magnificent blog.
An excellent read. I’ll definitely be back.